Le bord d'aile de KSP
- L'amûnissage
(mods utilisés
:
KER - Kerbal Engineer Redux)
- redécollage
- autres landers
Être en orbite autour de la Mûn, c'est bien. S'y poser, c'est mieux. S'y poser et en revenir, c'est encore mieux ^^
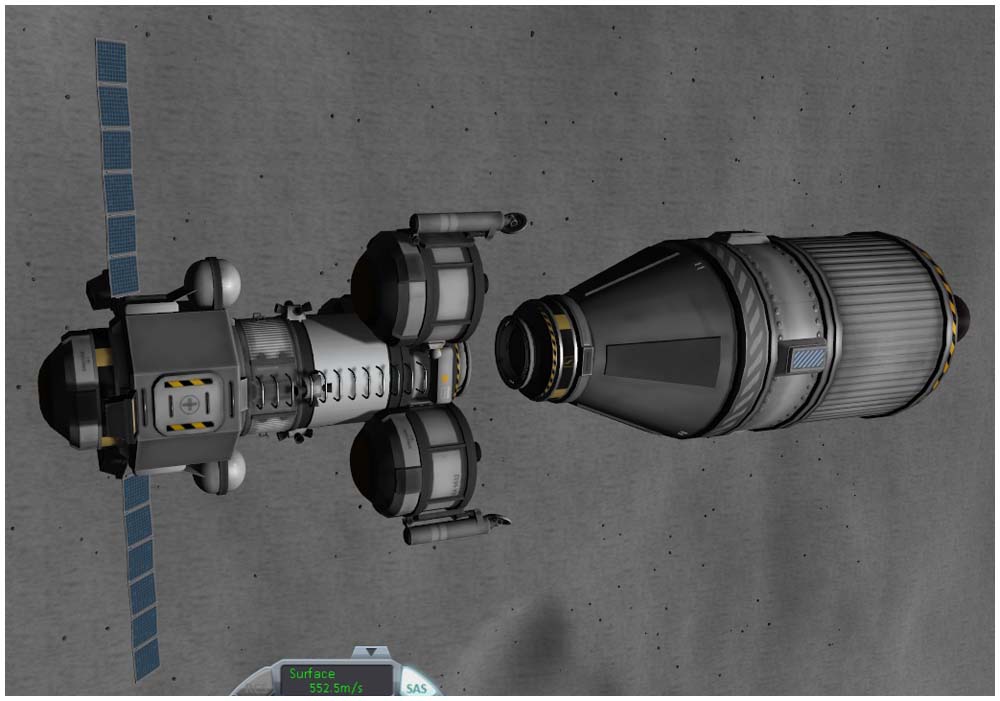
Dans le dernier tuto nous nous sommes mis en orbite à +/- 7 km de la surface la Mûn. Il est temps de découpler le lander et d'aller se poser.
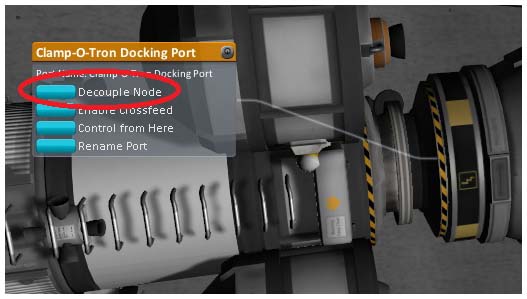
/!\ Avant de découpler, assurez-vous que les réservoirs de votre lander sont pleins (ce serait ballot...). Nous avons coupé le crossfeed d'un des découpleurs lors de la conception, mais il vaut mieux vérifier et être sûr que de partir avec un lander vide qui ne nous servira pas à grand-chose.
Pour transférer le fuel, si besoin, clic droit sur un réservoir, Alt-clic droit sur un autre réservoir, et des boutons In et Out apparaissent sur les réservoirs, y'a qu'à choisir le bon sens.

Une fois le passage à la pompe effectué, clic droit sur un des deux docking port, "Decouple Node", un p'tit coup de RCS en avant pour s'éloigner du module de transfert, et nous voilà libres.
On zappe ensuite sur l'étage de transfert (touche ^ par défaut) et on le renvoie à 30 km d'orbite où il va nous attendre sagement. Je vous fais grâce de la manip', vous savez comment on fait maintenant :op (bon, l'inconvénient d'être une altitude aussi basse c'est qu'on ne peux avoir le time warp qu'à x10 maxi, du coup c'est un peu plus long)
On revient ensuite sur le lander.
Ici on ne va pas choisir de site d'atterrissage précis, on va juste aller se poser quelque part côté jour. Pour cela, deux solutions : la plus facile, on pousse rétrograde jusqu'à annuler sa vitesse (ou pas loin) et on se laisse tomber jusqu'au sol en effectuant un suicide burn (voir plus bas). Plus facile, mais ça consomme aussi plus de carburant (toute la vitesse que l'on va gagner en tombant vers la surface en chute libre sera à annuler ; c'est pour ça que partir d'une orbite la plus basse possible est plus économique).
La deuxième, partir sur une trajectoire en cloche, ce qui consomme moins mais est plus difficile. En gros, faite une sauvegarde avant et entrainez-vous pour avec quel angle d'ouverture de la parabole vous êtes le plus à l'aise ;o) (le TWR est ici important, plus il sera grand et plus vous pourrez avoir le luxe d'effectuer votre poussée tard). Pour la suite on va partir sur cette méthode, car comme on dit, "qui peut le plus peut le moins", donc on va prendre la plus dure :op
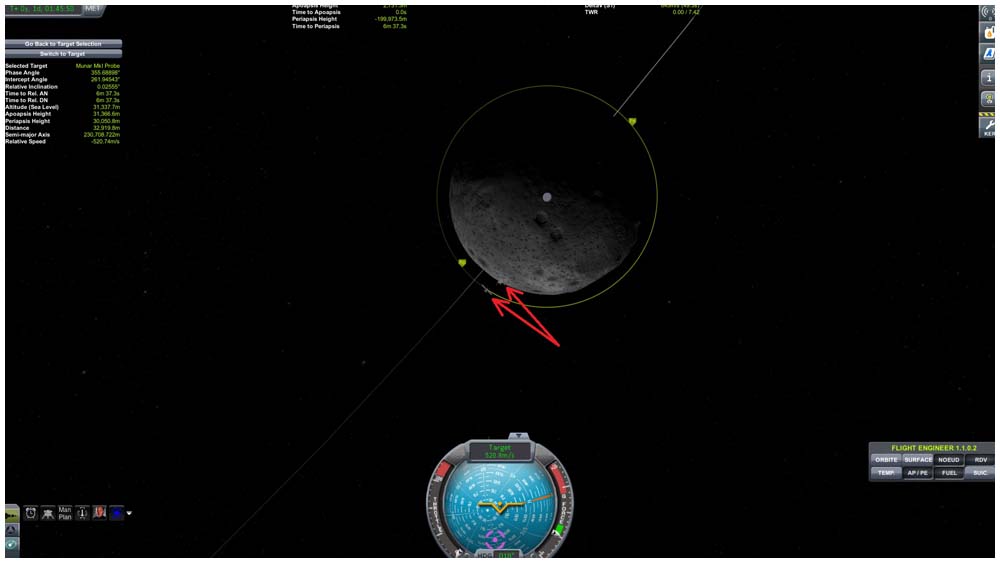
On allume donc les moteurs du lander et on va poser un nœud de manœuvre à peu près comme ceci :
N'hésitez pas à poser le point d'atterrissage bien à l'est de la zone que vous visez (enfin, si vous tournez dans le même sens que la Mûn, sinon c'est le contraire), car il va se déplacer au fur et à mesure de notre freinage, se rapprocher de notre vaisseau. En gros, plus la trajectoire sera ouverte, moins on consommera (si on ne se crashe pas ^^ ), mais moins on sera précis. Donc pour un atterrissage de précision (genre rejoindre une base au sol), on préfèrera partir sur une trajectoire verticale ou presque, même si ça consomme plus.
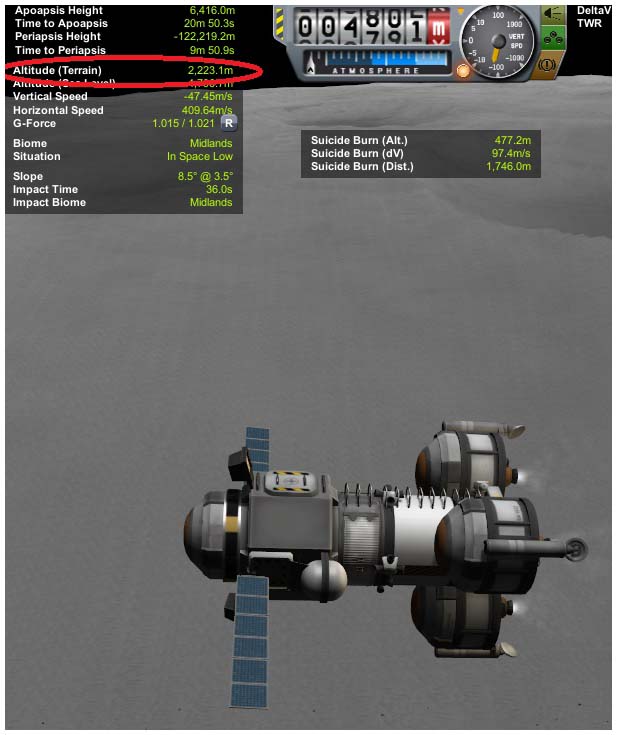
Une fois la poussée effectuée, il y a plusieurs infos à prendre en compte :
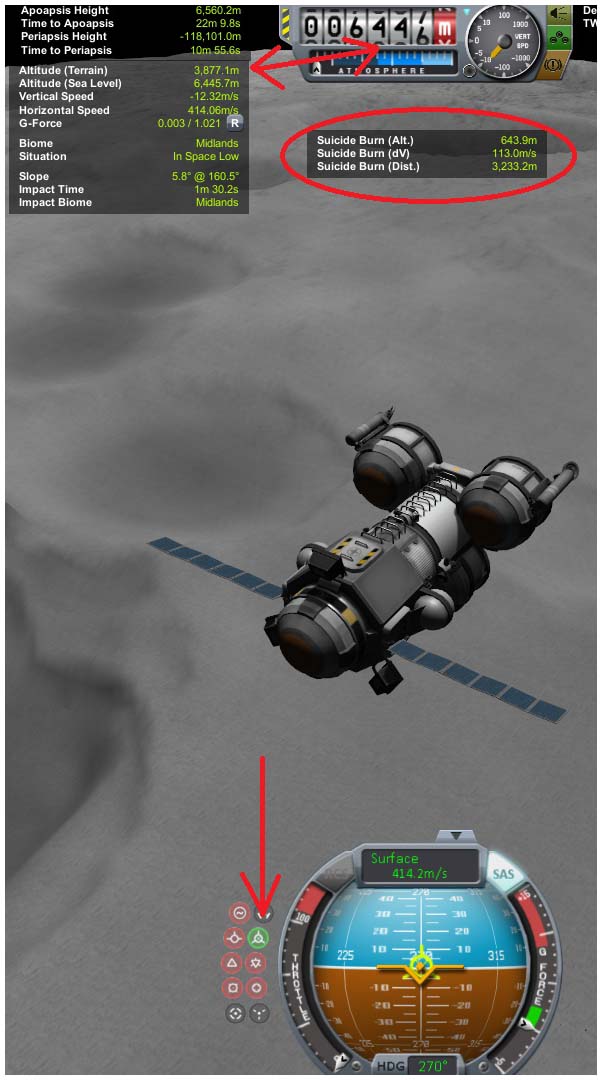
D'abord, on demande au SAS de suivre le rétrograde puisque nous devrons
annuler notre vitesse pour nous poser. Ensuite, on aura besoin de
l'onglet Surface de KER pour avoir l'altitude par rapport au terrain ;
le compteur en haut indique l'altitude ASL (Above Sea Level ; par
rapport au niveau de la mer -même s'il n'y a pas d'eau sur la Mûn ^^ ),
mais celle qui nous intéresse est l'altitude AGL (Above Ground Level ;
par rapport au sol). On voit d'ailleurs qu'il y a une sacré différence,
le compteur nous indique un peu moins de 6 500m alors que nous sommes en
réalité à moins de 4 000... Ce serait dommage de s'emplafonner une fois
arrivé aussi loin ^^ (sinon il y aussi le mod
Landing Height, qui passe le compteur en AGL lorsque la navball est
en mode Surface, et en ASL classique lorsqu'elle est en mode Orbite ;o)
)
Enfin, nous allons avoir besoin des infos de suicide burn que KER peut nous fournir (je crois que par défaut elles apparaissent dans l'onglet Orbite de KER, mais je n'en suis pas sûr, je les met toujours dans une fenêtre séparée). Un suicide burn est une technique qui consiste à mettre plein gaz au dernier moment pour, en théorie, arriver à une vitesse nulle au moment de toucher le sol. En pratique en gardera bien sûr une marge de manœuvre parce que, comme son nom l'indique, c'est un poil risqué et les premières fois on a tendance à s'encastrer dans le sol :op Surtout qu'en plus les infos de KER ne sont fiables qu'en situation verticale, à l'horizontale comme ici il serait... suicidaire ( ^^ ) de s'y fier. Mais on en aura besoin quand même ;o)
Alors le grand principe pour un atterrissage c'est d'être maître de sa vitesse. Un bon indicateur est d'être à environ 1/10e de notre altitude. Par exemple ici à 3877m, nous devrions voler à 387 (on oubliera les .7) m/s. On peut déjà ralentir à cette vitesse si on veut jouer la sécurité, mais plus on poussera en rétrograde plus on décalera notre point d'atterrissage vers l'ouest. Avec ce lander on peut commencer à mettre les gaz quand on passe les 2 500m (AGL), voire un peu plus haut si vous voulez être vraiment sûr (mais en consommant un poil plus).
Moins de 2 500m, je met les gaz.
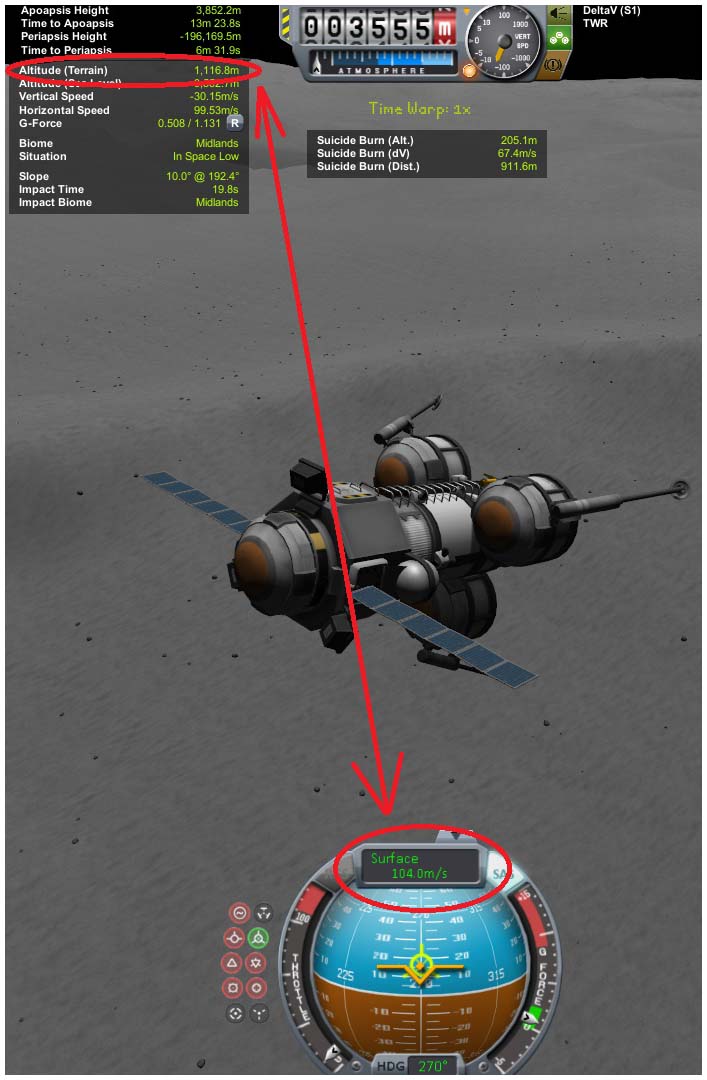
1 116m, ~111 m/s (environ hein, on ne peut pas être hyper précis non plus ^^), on coupe ou réduit les gaz, selon les besoins. On peut déjà déployer les pieds d'atterrissage, ça évitera d'avoir à y penser plus tard quand les choses se précipiteront. De toute façon il n'y a pas d'atmosphère donc on se fout de ne pas être aérodynamique ^^

Moins de 300m, moins de 20 m/s, je peux maintenant couper les gaz et me concentrer sur mon suicide burn. KER devrait être assez précis maintenant, et de toute façon on remonte à la verticale assez vite. Les infos m'indiquent que je devrais commencer mon burn à 48m d'alitude, soit dans 242 m/s de là maintenant tout de suite, et qu'il m'en coûtera 33 m/s pour annuler ma vitesse. En gros, donc.
Les pieds d'atterrissage peuvent encaisser une vitesse de 12 m/s maxi, mais on évitera quand même car à cette vitesse on a toutes les chances de rebondir. Une vitesse de touché de 4-5 m/s est plus recommandable ;o) Sur l'onglet Suface on peut voir que nous allons atterrir sur une pente de 14° (ligne "Slope"), mais notre lander est assez large, ça ne devrait passer sans basculer. De toute façon on se déplace encore à presque 10 m/s de vitesse horizontale donc on va encore se déplacer, ça sera peut-être mieux. Ou pire. ^^
Au moment de toucher le sol (2-3s avant quoi), faite un bref appui sur F pour repasser votre SAS sur son mode par défaut (ça va plus vite que de le faire à la souris, on a autre chose à surveiller à ce moment-là). Si vous restez sur le rétrograde, votre lander continuera à le suivre après avoir touché et le sol et de partir en cacahouète si vous n'être pas totalement vertical et que vous faites un petit rebond. Bref, il risque de basculer, avec le SAS en mode standard, on évite ça.
Bon je n'ai pas pris de screenshot car ce n'est pas évident de surveiller sa vitesse, sa position et d'appuyer sur F1 en même temps ^^
Au final, pas de bol, j'ai atterris sur la pente d'un cratère et je fais du toboggan dessus. Mais le lander tient le coup et ne bascule pas, merci le concepteur de ce bel engin :op
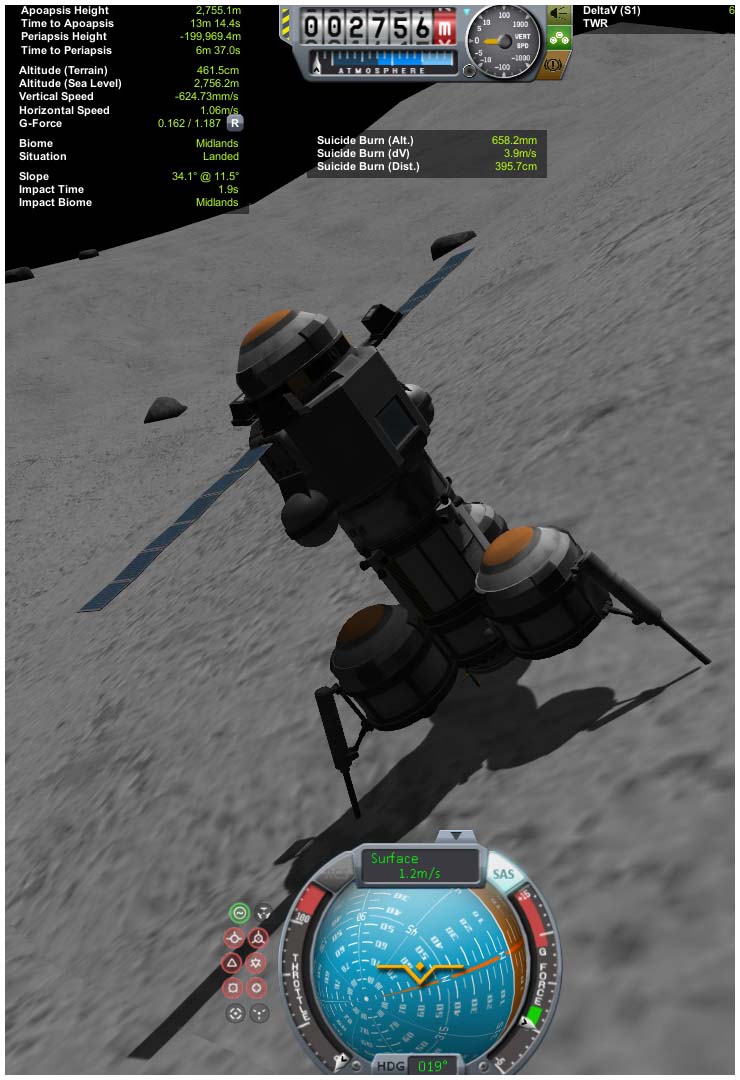
1.2 m/s, ça va encore, on peut laisser glisser ( ^^ ), mais si la pente est forte et que la vitesse s'accroit trop, coupez le SAS et freinez avec les RCS (si le SAS est enclenché les RCS risquent de faire n'importe quoi et au final ça risque de vous accélérer encore plus).
Arrivé en bas, ouf, tout va bien, rien de cassé :o)

(cliquez pour agrandir)
Il reste 645 m/s de fuel dans mon lander, j'en avais 1270 à la base, ça fait 625 de consommé pour me poser. C'est plus que les 580 prévus par la carte des Dv, mais il m'en reste assez pour repartir (toujours selon les calculs théoriques).
Après toutes ces émotions, Val' est contente de pouvoir aller poser son petit drapeau et de faire ses relevés scientifiques :o)
A l'époque où il est venu pour la première fois, Jeb' aurait dit "c'est un petit pas pour moi, mais c'est parce que je me suis pris les pieds dans mes lacets". Val' n'a pas eu ce problème (elle a prévu des chaussures à scratches :op )
- Redécollage
Retour en
haut de page
Ouais hein, parce qu'on ne va pas rester ici éternellement non plus.
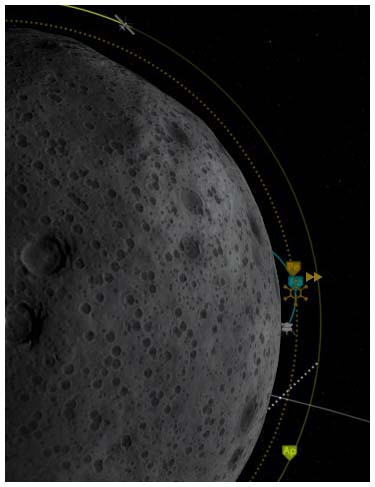
Pendant que nous descendions vers le plancher des... heu... rien du tout, y'a pas de vaches sur la Mûn, notre étage de transfert a continué sa route 30 km au-dessus de nos têtes. Comme on va devoir s'y arrimer pour rentrer, on va le cibler.
(cliquez pour agrandir)
Il est actuellement en train de passer au-dessus de nos têtes, on va attendre un peu et on le rattrapera. En général j'attends que le Intercept Angle sur l'onglet RDV de KER soit à 330° pour repartir, c'est en général un bon compromis entre les temps passé à attendre de le rattraper et avoir le temps de s'aligner avec lui (si on décolle alors qu'il est juste au-dessus, on peut ne pas avoir le temps d'atteindre un AN ou DN pour s'aligner avant de devoir faire notre poussée de RDV).
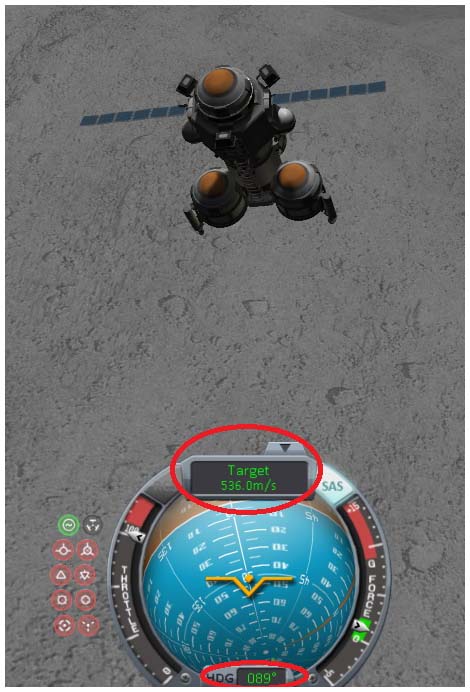
Pour redécoller, on met un peu de gaz pour monter très doucement, le temps de s'aligner sur 45° à l'est (heading )90°) ou plus haut si vous êtes au fond d'un cratère, puis plein gaz pour obtenir un AP à une 15aine de km. Attention à la navball qui a toutes les chances d'être passée en mode "Target" (cible), cliquez sur le cadrant de vitesse pour la repasser en mode Orbite pour l'instant.
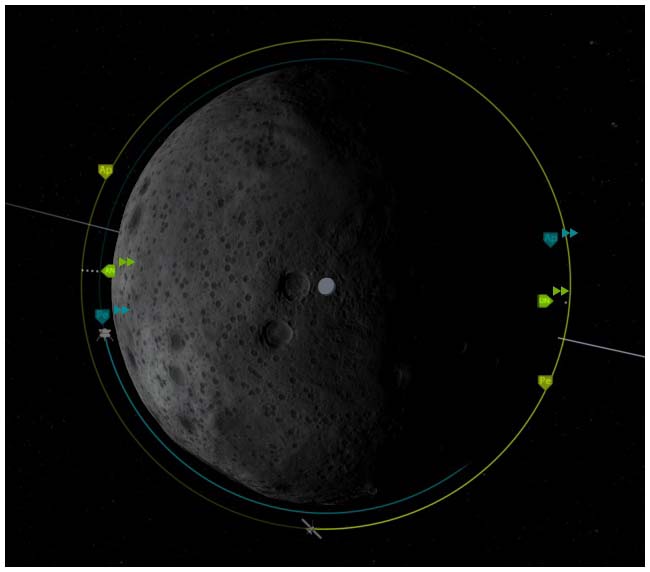
Et on pose un nœud à l'AP pour circulariser, comme sur Kerbin.
Et nous voilà remontés.
Prochaine étape : retrouver notre étage de transfert et s'y docker pour pouvoir rentrer à la maison.
- D'autres
exemples de landers de mon cru :
Retour en
haut de page
Le lander a pieds télescopiques repliables (avec Infernal Robotics pour les pistons et charnières) :
Plus soft, le tripod à pieds télescopiques non repliables ^^ Mais obligé de passer de deux moteurs au-dessus (amplement suffisant) à trois.
Les deux ont été faits dans le but d'avoir, à l'atterrissage, un maximum de largeur à la base pour pouvoir atterrir même sur les terrains en pente sans risque de basculer (les conduites de fuel sur ce dernier s'étirent en même temps que les pistons, c'est magique :op )
Encore plus fou, le "Mûn Crawler" :
Un énorme engin avec des réacteurs pivotants à 90° (là aussi via Infernal Robotics) pour se poser ou pour le vol, embarquant un gros labo permettant de réinitialiser les autres instruments (aujourd'hui un simple scientifique peut le faire, plus besoin de ce gros truc énorme pour ça ^^ ). Pas évident à piloter à la verticale, j'avoue :op
Son but était d'atterrir sur la
Mûn et de parcourir les différents biomes en roulant, pour éviter de
devoir faire un aller-retour sur Kerbin à chaque fois. Un maxi-rover
quoi.
Idée finalement abandonnée parce que c'est beaucoup trop lent :op
(et difficile à contrôler sur les descentes un peu raides). Mais au
moins il fonctionne, j'ai fait 3 biomes avec quand même ^^